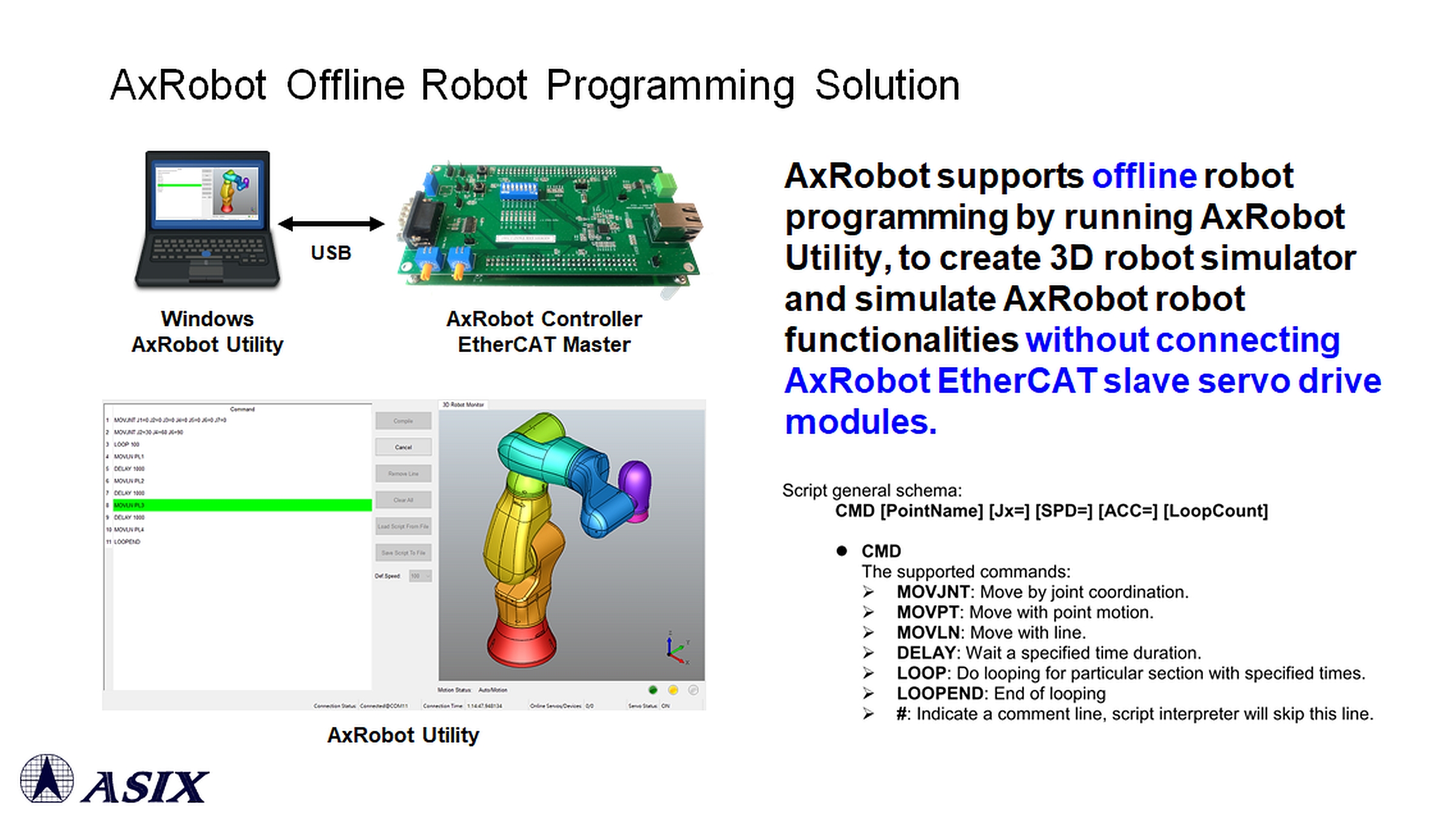
ASIX AX58200 AxRobot supports offline and online robot programming functionalities. This video demonstrates the offline robot programming functionality of AX58200 AxRobot EtherCAT 7-Axis Force-Assisted Control Robot solution.
ASIX AxRobot EtherCAT 7-Axis Force-Assisted Control Robot solution uses AxRobot servo drive modular design with AX58200 EtherCAT slave controller SoC to effectively reduce the motor drive board PCB space and hardware design cost for each robotic arm joint. Using EtherCAT Daisy-Chain network topology technology to communicate between AxRobot controller and AxRobot servo drive modules, all robotic arm joints can be easily wired together in sequence. It provides the simplest network wiring in each robotic arm joint and reduces the difficulty of equipment maintenance.
Normally, the collaborative robots are equipped with force sensors skin to obtain external contact forces information for realizing the Human-Robot Collaboration functionalities. AxRobot EtherCAT 7-Axis Force-Assisted Control Robot solution needs not be equipped with extra expensive force sensors skin, and supports the external forces assisted controller for realizing the collaborative robot functionalities. While detecting sudden external forces collision events, it can stop the operation of the robotic arm in an emergency and send out error alarm messages to ensure the personal safety of nearby operators.
ASIX offers AxRobot EtherCAT 7-Axis Force-Assisted Control Robot development kit for designers to easily evaluate AxRobot software force-assisted control robot functionalities. In addition, ASIX also offers the engineering design services for AxRobot EtherCAT 7-Axis Force-Assisted Control Robot solution. For more information, please contact ASIX Electronics Corp. via e-mail: sales@asix.com.tw.